CARG AI4UAV: Obstacle detection and avoidance
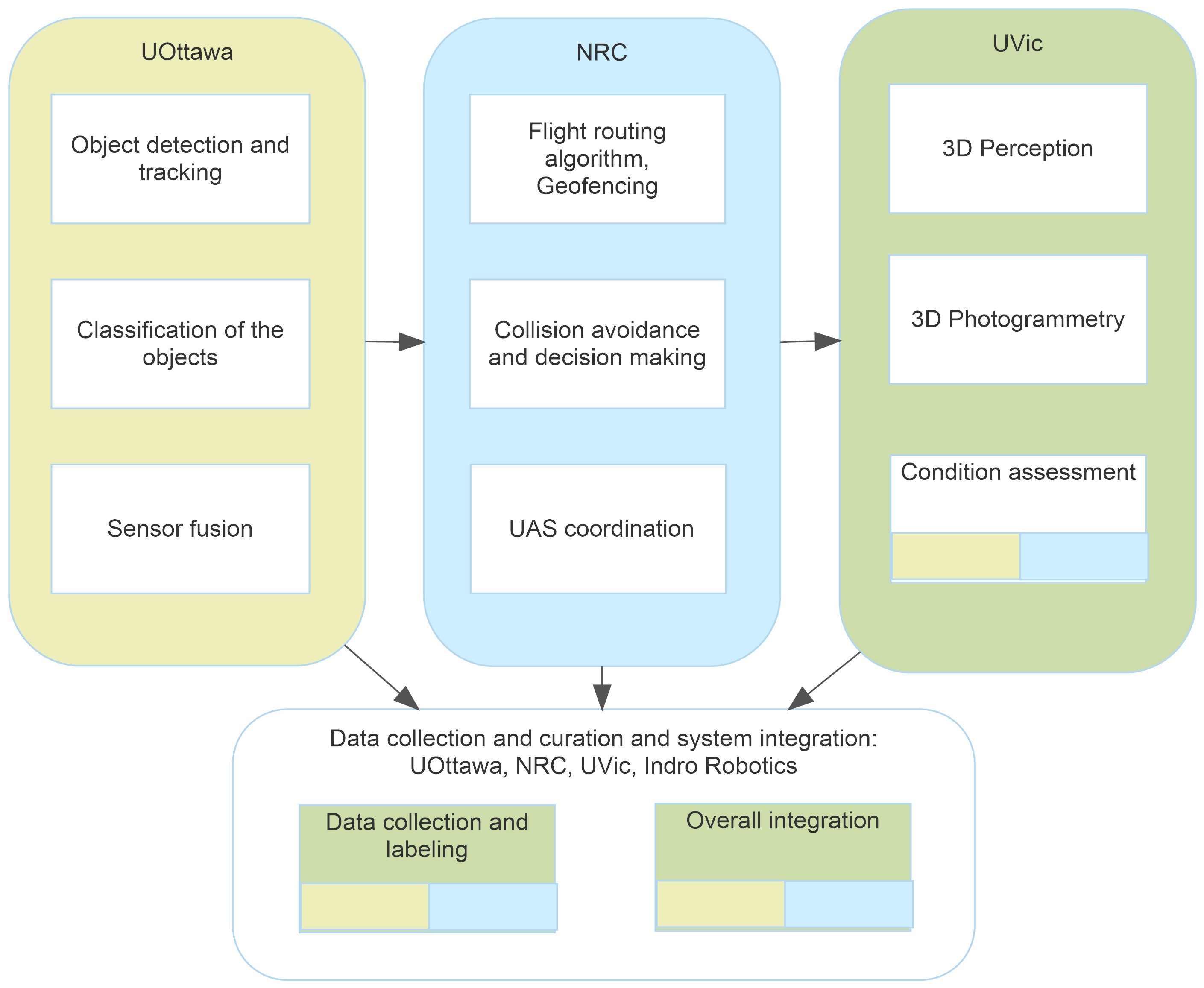
The research and technical developments in this project will enable UAS platforms to perform inspection, monitoring, and modeling the state of critical infra and superstructure in the BVLOS (Beyond Visual Line of Sight) mode, safely from a remote location. The threat detection and collision avoidance methods will provide the critical capability for BVLOS navigation of multiple drones to and around the infrastructure.
Research Papers
- H. Azad, V. Mehta, I. Mantegh and M. Bolic, DroneRanger: Vision-Driven Deep Learning for Drone Distance Estimation, 2024 International Conference on Unmanned Aircraft Systems (ICUAS), Chania - Crete, Greece, 2024, pp. 442-449, doi: 10.1109/ICUAS60882.2024.10557013.
- - Description: This paper introduces a novel approach to vision-based localization of drones using deep learning techniques.
- S. H. Gazani, F. Dadboud, M. Bolic, I. Mantegh and H. Najjaran, Object Semantics Give Us the Depth We Need: Multi-Task Approach to Aerial Depth Completion, 2023 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Honolulu, Oahu, HI, USA, 2023, pp. 2565-2570, doi: 10.1109/SMC53992.2023.10393905.
- - Description: The paper combines aerial depth completion and object detection tasks in a multi-task network.